Implementation of the Extended Kalman Fitler implementation for multirobot cooperative positioning. More...
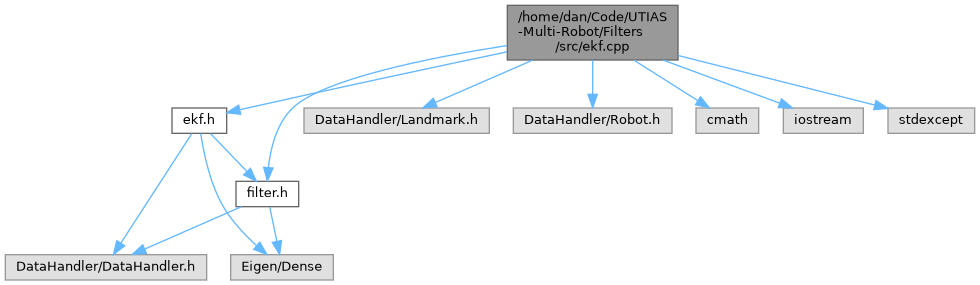
#include "ekf.h"#include "filter.h"#include <DataHandler/Landmark.h>#include <DataHandler/Robot.h>#include <cmath>#include <iostream>#include <stdexcept>
Include dependency graph for ekf.cpp:
Detailed Description
Implementation of the Extended Kalman Fitler implementation for multirobot cooperative positioning.
- Date
- 2025-05-01